

随着科学技术的快速发展,有越来越多的矿用机车倒车影像装置被使用在矿用机车,用以提升车辆的易用性和稳定性。车载视频头为其中具代表性的器件之一,被广泛的使用在矿用机车倒车影像,行车记录,停车辅助等系统中。
其中,随着调焦技术的发展,基于自动调焦的车载视频头系统将被广泛应用在机械生产流水线中。基于AVR的车载视频头自动调焦定位控制系统,利用步进电机驱动器设计了车载视频头自动调焦定位控制系统的硬件电路,以C语言为编程语言,设计了上位机人机对话界面,接收下位机的多路采集数据,实现了对车载视频头转台位置的准确控制。并用搜索算法中的爬山算法作为自动调焦系统搜索算法,实现了车载视频头的自动调焦。
针对交通摄像头自动调焦系统存在的采集频率不高、调焦精度较低、图像质量模糊等问题,在手动调焦镜头上加装电动调焦驱动装置.对整个控制系统进行测试,确认完成一次调焦约需要105ms,调焦精度保持在0.013 mm以内,角度定位精度保持在1°左右,且能对自动调焦量进行补偿,效果良好。
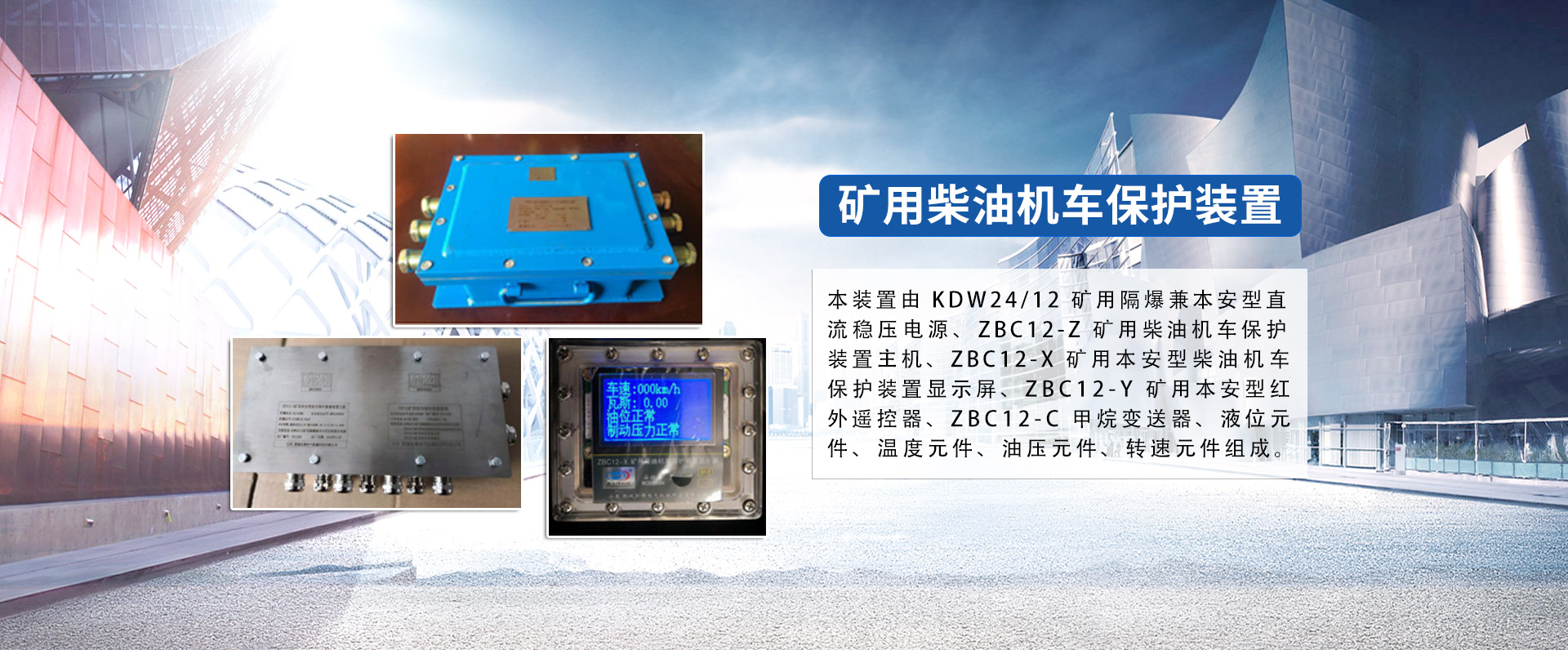
矿用机车倒车影像装置解决了倒车影像摄像头粘上水或灰尘使倒车影像模糊的问题。本装置包括有用于采集影像信息的摄像头和有用于对摄像头进行保护控制并对倒车影像进行处理并发送图像信息的倒车影像控制单元,倒车影像控制单元的输入端连接有用于传输汽车各种信号的CAN总线网络,摄像头连接倒车影像控制单元。
矿用机车倒车影像装置控制单元的输出端口连接有用于在摄像头不进行检测工作时控制摄像头进行转动隐藏和在摄像头开始检测工作时进行反转工作的摄像头保护机构,倒车影像控制单元的输出端通过CAN总线连接有用于图像显示的显示单元。本装置能控制摄像头不检测工作时进行隐藏。

 公司名称:肥城弘锦电气机械科技有限公司
公司名称:肥城弘锦电气机械科技有限公司
 联系电话:18660877796 17662650502 闫经理
联系电话:18660877796 17662650502 闫经理
 公司传真:0538-3536676
公司传真:0538-3536676
 公司地址:肥城高新技术产业开发区
公司地址:肥城高新技术产业开发区
热线:0538-3532976

